Sao Nam Tronics




Danh mục sản phẩm
Hỗ trợ trực tuyến
 Hotline hỗ trợ
Hotline hỗ trợ0983.872877 Mr Sơn
Email liên hệ:
sn@saonam.pro.vn


Góc nhìn mới nhất về định nghĩa Biến tần là gì, các chiến lược điều khiển tốc độ động cơ trên thế giới.
Biến tần là gì
Với kiến thức, kinh nghiệm gần 30 năm hoạt động trong lãnh vực sửa chữa thiết bị điện tử, sửa chữa thiết bị công nghiệp, kết hợp với một số tài liệu khoa học chính thống của các nhà khoa học trên thế giới , Sao Nam Tronics đưa vào bài viết những thông tin chắt lọc, trình bày theo logic, mong muốn cung cấp cho người đọc lý thuyết trực quan nhất có thể về những hiểu biết cơ bản trong phạm trù Biến Tần.
Bộ chuyển đổi điện áp một chiều thành điện áp xoay chiều thường được gọi là bộ biến tần (Inverter), trong khuôn khổ của bài viết, chúng ta đi sâu vào phân tích công nghệ biến tần điều khiển động cơ không đồng bộ 3 pha với hai chiến lược điều khiển chính, VFD V/F và VFD Vector, về kỹ thuật điều điều chế độ rộng xung PWM cho biến tần, chúng tôi sẽ điểm qua trong một bài viết khác.
Mặc dù định nghĩa về biến tần, các công nghệ điều khiển là kiến thức đã có từ lâu, nhưng vì sao có tiêu đề "Góc nhìn mới ... " ? Giải thích: Hiện trên nhiều website viết về Biến tần rất lan man, thậm chí có người viết không phải giới chuyên môn nên người đọc dễ bị rơi vào ma trận nên càng không thể hiểu. Bài viết này xin được giới thiệu là bài viết mang tính mới mẻ, và cô đọng ngắn gọn, chuẩn xác nhất cho những ai muốn hiểu hơn về các bộ biến tần điều khiển động cơ không đồng bộ.
Bất kể mọi loại biến tần nào, cũng đều điều khiển hai tham số đầu ra là điện áp và tần số, nhưng được phân ra hai chiến lược gồm điều khiển VFD V/F và VFD Vector và về cơ bản thì giống nhau về bản chất, nhưng có đôi chút sự khác biệt về mối liên hệ giữa hai đại lượng nêu trên.

Công nghệ biến tần điều khiển V/F
Ứng dụng chính của biến tần là điều khiển tốc độ của động cơ trong dải từ zero tới maximum theo thông số số vòng quay của động cơ RPM. Để hiểu bản chất của chiến lược điều khiển V/F, trước hết, chúng ta để ý rằng nếu việc chỉ giảm giảm tốc độ của động cơ thì sẽ làm tăng chi phí sử dụng năng lượng điện do gây giảm hiệu suất động cơ, hệ số công suất điện thấp. Cơ sở cho luận điểm này ( Xem biểu thức từ thông - H.1 ), khi f giảm sẽ gây ra từ thông tăng lên dẫn đến sự bão hòa từ stator và lõi rôto, khiến dòng điện không tải của động cơ tăng. Do vậy, vấn đề quan trọng là phải duy trì từ thông. Bằng cách thay đổi tần số tiến hành đồng thời với việc giảm điện áp để duy trì từ thông, đó chính là bản chất, tên gọi của công nghệ biến tần V/F.
E or V = 4.44 Ჶ K.T.f hay Ჶ = V / 4.44 K.T.f
Hình 1. Mối quan hệ giữa từ thông với các đại lượng
Trong biểu thức, K là hằng số cuộn dây, T là số vòng dây mỗi pha và f là tần số. K & T là hằng số, V, F là các biến số.
Trong hầu hết các ứng dụng, biến tần V/F luôn là sự lựa chọn tuyệt vời do chi phí không cao, nhất là trong dải tần số 5 – 50Hz. nhưng nếu điều chỉnh xuống dưới 5Hz, hay vài trăm Hz, động cơ sử dụng biến tần VFD công nghệ V/F không thể tạo ra mô men xoắn lớn. Giải pháp cho vấn đề nhu cầu động cơ hoạt động ở tần số rất thấp, đó là công nghệ điều khiển vector.
Công nghệ điều khiển vector
Công nghệ điều khiển vector ( Mặc dù cũng là điều khiển cặp V/F ) có sự điều chỉnh riêng biệt tần số và điện áp ( Là sự khác biệt với chiến lược V/F, khi V/F luôn duy trì mối quan hệ tỷ lệ giữa tần số với điện áp ). Bằng cách này, nó tạo ra mô men xoắn cao ngay tại các tần số thấp ngay cả dưới 1Hz. Chiến lược này giám sát hai vector từ thông và Vector mô men. Có sự khác biệt với V/F, tại tần số rất thấp vài Hz, V/F gần như không tạo ra mô men thì cách điều khiển vector tập trung vào điều khiển mô men xoắn, một điện áp cao sẽ được áp dụng để tăng cường độ lực mô men, và đây được xem là điểm khác biệt lớn về hai trường phái cùng điều khiển V/F.
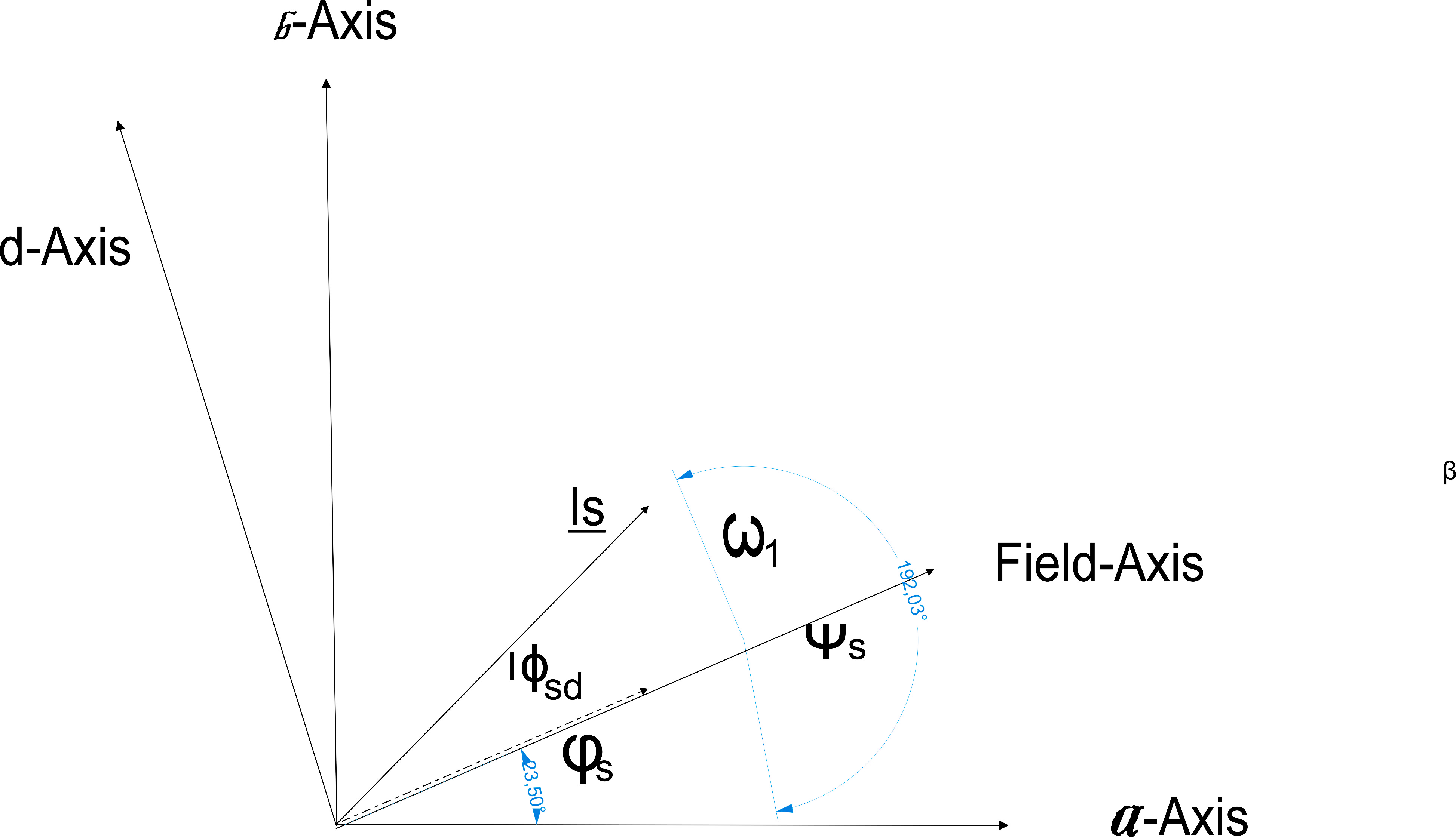
Hình 2. Biểu đồ vectơ của dòng điện stato và từ thông stato
VFD vector về cơ bản có hai loại là vòng kín và vòng hở.
Truyền động vectơ vòng kín yêu cầu động cơ phải có phản hồi bộ mã hóa cung cấp thông tin vị trí trục động cơ cho biến tần. Biến tần sử dụng thông tin này để liên tục thay đổi tỷ lệ V / Hz để tạo ra mô-men xoắn cực đại. Loại VFD này có hiệu suất rất cao và rất đắt.
Truyền động vectơ không cảm biến hoạt động với động cơ tiêu chuẩn, nhưng vì không có phản hồi bộ mã hóa, hiệu suất không hoàn toàn tốt bằng vòng kín, nhưng vẫn tốt hơn nhiều so với ổ đĩa V / Hz. Thay vì nhận thông tin thời gian thực từ bộ mã hóa, VFD vectơ không cảm biến ước tính điều gì đang xảy ra bằng cách tạo một mô hình động cơ trong phần mềm của nó. Mô hình này được tạo bằng cách sử dụng thông tin động cơ mà người dùng nhập theo cách thủ công, cùng với thông tin khác mà biến tần đo được khi nó được kết nối với động cơ.
Nhấn mạnh rằng, biến tần VFD vectơ không giải quyết rõ ràng mối quan hệ Voltage / Hz. Thay vào đó, chúng giải quyết hai dòng điện cụ thể trong stato một cách mô phỏng. Mối quan hệ V / Hz được giải quyết ngầm theo mật độ từ thông từ tổng vectơ của các thành phần dòng điện được mô tả như sau:
Đầu tiên là xác định từ thông trên rô to bằng dòng điện từ hóa. Vì không có từ trường bên trong rôto của động cơ, nên nó phải được tạo ra bằng cách sử dụng điện từ. Dòng điện một chiều được điều khiển trong stato để tạo ra trường điện từ trong rôto. Khi rôto quay, từ trường này quay đồng bộ với rôto để duy trì hướng tĩnh của từ trường so với rôto.
Thứ hai là xác định mô men quay bằng cách đo dòng điện sản sinh mô-men xoắn. Dòng điện này được điều khiển trong stato để tạo ra một trường điện từ khác trong chính stato được định hướng so với từ trường sinh ra trong rôto như mô tả ở trên. Khi cường độ của dòng điện tạo ra mômen tăng, thì mômen tác dụng lên rôto ( ví dụ trục động cơ ) tăng lên.
Đó là TỔNG VECTOR của hai dòng điện này trong stator được biến tần giải quyết trong ứng dụng truyền động Vector. Do đó "VFD Vector Drive" là tên gọi của kỹ thuật điều khiển của dòng biến tần này. Một bộ điều khiển sẽ tính toán hai vector cường độ dòng điện tương ứng với từ thông và mô men quay để xuất tín hiệu PWM điều khiển động cơ.
Một đặc điểm đáng lưu ý là trong điều chế vector, động cơ đồng bộ hoặc không đồng bộ được điều khiển bởi tất cả điều kiện hoạt động giống như động cơ một chiều kích từ tách riêng. Đó là, Động cơ xoay chiều hoạt động giống như động cơ 1 chiều với từ thông phần cảm và từ thông phần ứng được tạo bởi dòng phần cảm và dòng điện phần ứng (thành phần mô men quay). Các thành phần này là đường thẳng trực giao, Khi mô men quay bị điều khiển (thay đổi phần ứng), từ thông phần cảm không bị ảnh hưởng, do đó chúng ta có thể nhận được phản hồi của mô men quay.
Trong sơ đồ nguyên lý của các biến tần VFD vector, chúng ta sẽ thấy các thành phần phản hồi từ động cơ bao gồm điện áp, cường độ dòng điện và vị trí hoặc tốc độ quay thông qua các senso giám sát. Nói tới đây, chúng ta sẽ thấy VFD vector hình như hoàn toàn giống Servo drive, vì các thông tin phản hồi cũng đều là các tín hiệu đại diện cho một số biến vật lý gồm mô-men xoắn, vận tốc và vị trí. Nhưng giữa VFD vector và Servo drive có những sự khác biệt nhau, dễ nhận thấy nhất là VFD điều khiển động cơ lồng sóc trong khi Servo drive điều khiển động cơ nam châm vĩnh cửu. Với sự cấu tạo khác biệt cơ bản về cấu tạo động cơ, động cơ servo hoạt động rất linh hoạt khi thay đổi vị trí, vận tốc, trong khi động cơ không đồng bộ lồng sóc rất kém về tính linh động này, do đó, các VFD cũng không cần thiết phải thiết kế trình điều khiển phức tạp gây tốn kém như Servo drive.
Trong thực tế, điểm hạn chế nhất trong ứng dụng điều khiển động cơ với biến tần VFD vector là điện trở trên rô to có ảnh hưởng rất lớn khi điểu khiển động cơ tại tần số rất thấp, thông số điện trở này thường không được các nhà sản xuất ghi trên tem nhãn động cơ cũng như công bố trong các tài liệu kỹ thuật về động cơ.

Hình 3. Một vòng speed loop control system, tham chiếu cặp vector tại X4,X5
Một điểm cần lưu ý khác về thiết lập giới hạn tần số cho biến tần, nhiệm vụ cần tiến hành khi cài đặt tham số hoạt động trên biến tần cho động cơ sử dụng.
Động cơ điện 3 pha khi hoạt động ở chế độ cực đại, các thông số được ghi trên tem của nhà sản xuất với các thông số cực đại gồm điện áp max ( 380-440VAC ), Tần số max ( Ex. 50HZ, 400Hz tùy công bố của nhà sản xuất ), công suất ( kW/HP ), Cường độ dòng điện (A), Số vòng quay ( RPM ). Trong hầu hết các ứng dụng, chúng ta cần giảm công suất để đáp ứng các nhu cầu công việc, thiết bị biến tần sẽ là giải pháp được sử dụng phổ biến ngày nay, thông qua việc giảm tần số và điện áp tác động đến động cơ. Việc điều chỉnh tần số, điện áp đầu ra của biến tần được thực hiện theo các chiến lược điều khiển độ rộng xung khác nhau.
Các bài viết về công nghệ trên website của Sao Nam thời gian qua hay bị các công ty sao chép xuất bản lên website của họ mà không dẫn nguồn, xin đừng tiếp tục vi phạm.
Tin khác
- Những hiểu biết về dịch vụ sửa chữa thiết bị điện tử công nghiệp (20.01.2022)
- Chống ngắn mạch bán dẫn công suất (12.05.2021)
- Hướng dẫn bảo trì thiết bị Laser công nghiệp (15.11.2020)
- Lời khuyên các sinh viên về sự nghiệp (06.09.2020)
- Bàn về giá trị Thiết bị gia nhiệt cảm ứng (25.08.2020)













CÔNG TY TNHH SAO NAM TRONICS
Head office: P.903, Tầng 9, Tòa nhà Diamond Plaza, 34 Lê Duẩn,
Phường Sài Gòn, TP HCM
Mã số doanh nghiệp: 0316424950
Tài khoản ngân hàng : 1015 922092 NH VCB
Xưởng sửa chữa thiết bị:
7 Đường Nhị Bình 15, Hóc Môn, TP. Hồ Chí Minh
Email: sn@saonam.pro.vn
HP: 0983 872 877 - Mr Sơn